
ROBOTIQUE (2009)
Une nouvelle activité (bien qu'ancienne) vient s'ajouter...
J'avais déjà un peu essayé il y a fort longtemps quelques petits "bricolos",
mais à l'époque un processeur digne de faire quelque chose et les composants annexes
étaient fort coûteux, gourmand en énergie et volume. Aujourd'hui, même si nos vendeurs Français ne jouent
pas le jeu du change Dollars/Euros les choses sont devenues presque
accessibles, un paragraphe y sera consacré.
Menu :
- Mes choix (ou le pourquoi du comment).
- Nos revendeurs Français (je râle !).
- Le début (ouverture des paquets et les différentes
pièces).
- La suite (la construction).
- Les essais.
- D'autres platines (CUBLOC, ARDUINO, PIC-WEB, ...).
- Ludotique ou les petits appareils de compagnie
domestiques.
Bon coté Français, je n'ai peut être pas suffisamment cherché, mais je
n'ai pas trouvé beaucoup de revendeurs de robotique "ludique", soit
on tombe dans les magasins de jouets un peu plus "adulte" avec des
solutions non évolutives, soit on revient aux boutiques de pièces détachées
avec quelques bases (parfois onéreuses vis à vis de ce qu'elles proposent).
On dépasse très vite les 150 Euros (1000 F) pour un châssis roulant à 2 ou 4
roues avec juste le(s) moteur(s), il faut tout de même se rappeler que pour la
même somme on peut avoir une voiture radiocommandée (au moins 2 voies tout
équipée) de la même taille... Bon mon but n'étant pas de faire de la
"voiture" j'ai donc cherché dans une autre direction.
Plusieurs liens m'ont renvoyés sur des boutiques hors Europe avec d'autres
modèles bien plus avancés et moins chers, mais j'ai fini par retourner dans
nos magasins Français, en quête de pièces détachée pour pouvoir assembler
quelque chose d'évolutif et de personnalisé.
J'ai donc opté pour débuter vers quelque chose qui ressemblerait au châssis
Pololu, mon but étant de faire un petit mobile pouvant tourner sur lui même,
se déplaçant aussi bien sur sol lisse (carrelage) que sur la moquette (haute)
et pouvant se repérer afin de pouvoir faire une cartographie de l'espace, le
mobile étant capable ensuite de retourner à une base pour se recharger. Le
tout me permettant de développer un ensemble de capteurs
"d'environnement" (I.R. et autres)...
Nos revendeurs Français. (Vers "Le début")
Parlons chiffre, petits exemples de prix (pour une même référence de pièce):
| Pièces | France (€) | Canada (CAD$) | US (US$) |
| Disque Pololu | 16,00 | 6,47 | 5,95 |
| Moteur 70097 | 17,90 | 11,99 | 8,95 |
| Roues 70101 | 6,00 | 4,99 | 4,10 |
Sachant que 1 Euro équivaut à 1,525 CAN$ ou 1,431 US$ au moment de la
comparaison, regardez un peu la
différence de prix, ou va t-elle ???
On peut épiloguer longuement sur les taxes et autres calamités tombant sur nos
revendeurs, mais je trouve un peu gros ces différences, le port entre pays
asiatiques et Europe ou Amériques ne doit pas être bien différent, d'autant que
les informations fournies dans leur catalogue ainsi que les notices
non-traduites ne le justifie pas.
Les taxes au niveau Douanes pour un produit électronique avoisine les 2%...
Ces différences de prix vont de 50% à plus de 300%...
Sans compter le moindre choix proposé, la non information sur l'origine et les
paramètres dimensionnels des
produits.
Maintenant je ne vous dis rien, mais allez voir dealextreme,
les prix sont port compris, la livraison prend autant de temps que certaines
boutiques Françaises, les appareils sont aussi documentés... et souvent les
logiciels ont la langue Française !
Après avoir visité quelques forum et quelques sites :
http://www.robot-passion.com/
http://www.planete-sciences.org/forums/index.php
http://www.robot-maker.com/index.php
Et ne sachant par quoi commencer je fais appel à mes souvenirs et je me décide
sur une base de PICBASIC, d'un double moteur avec deux roues de grand
diamètre (58mm) et d'une "roue folle" (faute de ne pas vouloir utiliser
un ball-caster à cause des tapis et de ne pas trouver de roue "folle"
je fini par acheter dans un magasin de Modélisme de Bordeaux une
roue "simple", restera à bricoler).
Ne connaissant pas le PicBasic, je m'offre le luxe de prendre la platine "study
board" et le cordon de programmation USB.
L'arrivée du colis :
Le moteur en kit (TAMIYA 70097), puis monté :
 |
 |
Bien que la notice en "Nippon" soit traduite en Anglais, on
comprend après quelques instants comment monter l'ensemble, il y a deux
rapports possibles 58:1 ou 203:1, à priori le 58:1 donne déjà une bonne
réduction (moteur utilisé à 3V environs), utiliser le 203:1 doit être pour
des mouvements très lents !
Attention l'ensemble est en plastique, ce n'est pas un moteur de
"force" et quelques pièces étant purement serties un
"sur-effort" pourrait faire passer de vie à trépas l'ensemble. A
priori la durée de vie des moteurs est de l'ordre de 40H à 3V...
L'outillage de montage est fourni dans la boîte (clé Hallen, tube de graisse
et vis de fixation moteur bois et vis/écrou), il faudra un bon cutter pour
dégrapper et éliminer les bavures et un tournevis cruciforme.
Les sorties en A ou B se font simplement en inversant les éléments des axes
toujours avec le rapport 58:1, la sortie en C correspond à la réduction 203:1.
Lors de l'achat et sur la boîte il manque les cotes de l'ensemble, à moins que
ce ne soit en Nippon !!!
Les voici (en mm) :
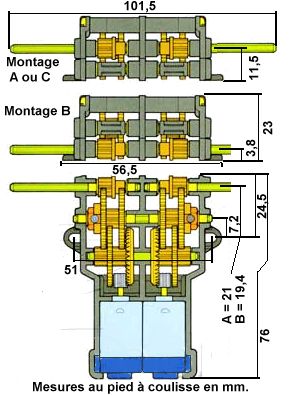
Les roues se montent en force sur les axes hexagonaux du moteur, attention à la masse complète qui va être installée sur l'ensemble, le bloc moteur va devoir supporter cette masse au bout d'un bras de levier de 30mm, l'axe étant tenu sur deux paliers lisses séparés de 20mm environ. Les roues sont aussi en kit, un flasque permet des les adapter aux axes hexa (de 2,7mm) ou à un axe fileté? de 3mm.

Coté platine d'essai, c'est assez complet pour découvrir le fonctionnement du PIC et ses limites :
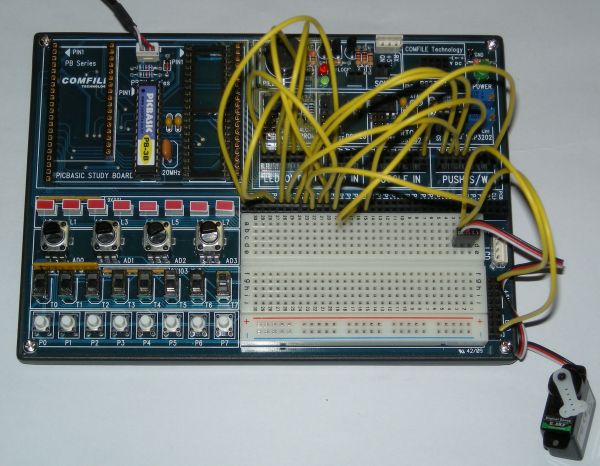
Seul les fils (jaunes) et un CD d'installation sont fournis
avec, pour le reste : alimentation, servo, afficheur, commutateur, ... il faudra vous les
approvisionner séparément.
Je regrette de ne pas avoir pris un afficheur, cela permet une aide au
déboguage intéressante ou tout simplement pour lire les informations de
mesures du PIC, ce sera pour une prochaine commande... On peut avoir un retour
dans la fenêtre de déboguage, mais cela bloque le fonctionnement du PIC le
temps de valider, donc pas très performant dans des boucles.
Coté logiciel, si les menus (du CD) sont multilingues, le logiciel lui reste au
mieux en Anglais et l'aide en Coréen, bon on s'y fait, reste à imprimer la
documentation sur le site du vendeur qui est en Français.
Coté premières utilisations voici ce que j'ai noté (sur PICBASIC
PB-3B) :
- programmation en BASIC aisée, pas de problèmes et avec la platine on peut
tester de suite.
- pas multitâche, apparemment l'entrée "Interruption" (16) n'en est
pas une ?
donc lorsque le programme est dans une boucle ou sur l'exécution d'une
instruction, pas moyen de lui attirer l'attention ailleurs, c'est un peu
dommage, par exemple : le mobile avance, il est en train de stocker des
données, s'il rencontre un obstacle pas moyen de couper les moteurs le temps de
finir le traitement.
- faire attention aux variables, il tronque sans prévenir et le
"compilateur" ne voit rien.
- attention aux multiplications avec décimales, cela devient pénible au delà
du 1/10eme...
- ....
Allez voir la fiche récapitulative de ce qu'il ne peux pas faire, ça sera plus
simple !
J'ai donc testé dans l'ordre, pour prendre en main le PIC
- les entrées (in) par bouton poussoir, simulation de contact d'obstacle
- la sortie (out) sur Led pour simuler la commande moteur
- la sortie sur buzzer (play) pour une indication de situation en musique (mais
à raccourcir en type R2D2) !
- le timer, pour faire clignoter une Led
- l'entrée par interrupteur, configuration
- l'entrée analogique (adin) & sortie servo, lecture d'un potentiomètre puis
réplication avec facteur sur un servomoteur
- Utilisation d'un buzzer piézo du commerce.
- Test de l'entrée "interrupt".
Programme test1.bas
Puis dans un contexte plus "mobile" :
- câblage d'un système équivalent à deux détecteurs de contacts droite
gauche
- d'un détecteur de contact en hauteur
- d'un bouton "start" et "stop"
- d'un système à deux moteurs commandés en T/R marche AV/AR.
- une led en clignotant pour vérifier le cadencement
Programme test2.bas
Parallèlement à la réflexion et l'approvisionnement des éléments pour
faire un petit châssis voici quelques idées en vrac...
La réalisation se poursuit, avec le châssis en PVC expansé, une plaque de
14x18cm fera l'affaire en la découpant pour une forme "oblongue" par
la suite, la roue folle envisagée après plusieurs essais est remplacée par
une roue trouvée en "grande surface".


Capteurs (micro-switch) et cellules énergies, j'ai prévu une alimentation
pour la logique et une pour les moteurs.
Coté capteurs j'ai été optimiste en ne vérifiant pas le moyen de fixation,
à priori prévu pour des vis de 2,5mm max, essayez de trouver des vis de 2 ou
2,5mm en boutique... Maintenant c'est du M3 minimum, sinon il faut passer en
boutique spécialisée (n'hésitez pas à demander dans votre
"grande-surface brico" ces vis de 2,5 ou 2mm, parfois ils ont un stock
caché connu seul du vendeur - dit pour dépanner - qu'il vous fourniront à
prix d'Or !!!) :

Voici la commande moteur que je vais adopter :
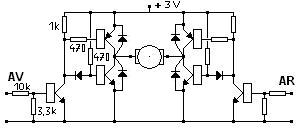 |
Photo CIE à venir... |
Transistors cms MMBT2222/2907, diodes et résistances aussi cms. Ce qui donnera
une micro platine "gravure anglaise" à 6 fils...
Sinon à l'aide d'une platine à trous et les mêmes composants en version
"traversant" on obtient le même résultat en un peu plus volumineux.